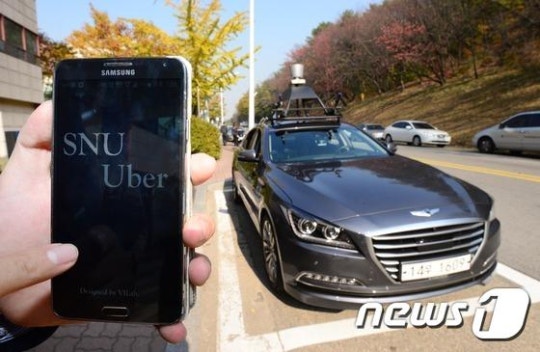
 '스누버'는 스마트폰 어플리케이션을 통해 자율주행자동차를 공유, 승객이 원하는 곳으로의 이동성을 제공하는 신개념 차량 공유서비스다.2015.11.4/뉴스1 © News1 민경석 기자
'스누버'는 스마트폰 어플리케이션을 통해 자율주행자동차를 공유, 승객이 원하는 곳으로의 이동성을 제공하는 신개념 차량 공유서비스다.2015.11.4/뉴스1 © News1 민경석 기자서울대 지능형자동차IT연구센터, 스누버(SNUber) 택시 시연
'ON BOARD.'
스마트폰 애플리케이션(앱) 스누버(SNUber)에서 탑승 버튼을 누르자 스누버 택시의 핸들이 저절로 움직였다.
4일 오후 2시13분쯤 스누버 택시는 천천히 서울대학교 교내 뉴미디어통신연구소 앞을 출발했다. 그러자 스누버 택시 운전자 좌석 뒤쪽으로 설치된 컴퓨터 모니터 안 3D 고정밀 지도 속 택시도 서서히 출발했다.
서울대학교 지능형자동차IT연구센터 소속 서승우 전기정보공학부교수·이경수 기계항공공학부교수 공동연구팀이 4일 오후 교내 캠퍼스에서 공개한 스누버는 스마트폰 앱을 통해 자율주행자동차를 공유, 승객이 원하는 곳으로의 이동성을 제공하는 차량 공유서비스다.
스누버 택시는 지붕에 달린 라이더 센서에서 레이저 64개를 발사해, 레이저가 돌아오는 결과를 토대로 전후좌우 80m 이내의 도로 상황을 인지하는 원리로 운행됐다.
만일의 사태에 대비해 운전석에 앉은 연구원은 양손을 들어올리거나 팔짱을 끼는 등, 핸들을 잡지 않은 채로 기자와 함께 스누버 택시의 운행을 지켜봤다.
 스누버 택시 내부에 설치된 컴퓨터 모니터에 표시되는 3D 고정밀 지도. 움직임이 있는 물체가 연두색 상자로 따로 표시가 된다. © News1
스누버 택시 내부에 설치된 컴퓨터 모니터에 표시되는 3D 고정밀 지도. 움직임이 있는 물체가 연두색 상자로 따로 표시가 된다. © News1출발지점에서 약 2km 정도 떨어진 행정관 근처로 목적지를 설정해 둔 스누버 택시는 교내 캠퍼스 내 순환도로의 기준속도인 시속 30km 이하인 시속 25km 내외로 도로를 달렸다. 내리막길이나 커브길에서도 스누버 택시는 매끄럽게 주행했다.
살짝 불안한 마음으로 탑승했지만 스누버 택시의 운전은 곧 믿음직스러워졌다.
건너편에서 승객을 다 태운 버스가 도로로 나오려고 하자 스누버 택시는 살짝 멈췄다가 다시 출발했고, 또 택배 때문에 앞차가 잠시 멈추자 따라 멈췄다가 약간 옆으로 핸들을 살짝 틀어 도로로 나오기도 했다.
이러한 과정에서 운전석에 앉은 연구원이 한 일은 이 차량이 자율주행자동차임을 알리기 위해 깜빡이 버튼을 누른 일밖에 없었다.
가을 햇빛이 눈부셔 앞이 똑바로 보이지 않았지만 스누버 택시에선 이마저도 방해가 되지 않았다.
스누버 택시가 횡단보도 부근을 지날 땐 모니터 속 3D 고정밀 지도에 횡단보도 표지판이 표시됐고, 과속방지턱을 앞두고는 과속방지턱 표지판도 표시됐다. 해당 구간을 지나면 지도 속 표지판은 사라졌다.
스누버 택시는 약 6분만에 목적지인 서울대 교내 행정관 근처에 도착했다. 택시에서 내린 후 할 일은 스마트폰 앱에서 'off'를 누르는 일밖에 없었다.
이 밖에도 스누버 택시는 처음의 목적지와 달라졌을 때 그저 목적지를 재설정하기만 하면 차량이 알아서 길을 찾아 주행하는 특징도 있다고 연구팀은 설명했다.
한편 이날 이경수 기계항공공학부 교수 연구팀이 개발하고 있는 양산형 자율주행자동차도 함께 시연됐다. 이 자동차의 경우에는 카메라 센서가 부착돼 사진을 찍는 방식으로 도로 상황을 인지했다.
사진을 찍는 만큼 색깔까지 정확하게 알 수 있다는 장점이 있었으나, 다만 밤에는 사용할 수 없다는 단점이 있었다.
이에 대해 서승우 센터장은 "라이더 센서와 카메라 센서 각각의 장단점을 살려 라이더와 카메라 등의 센서를 통합하는 방향으로 연구가 진행돼야 할 것"이라고 설명했다.
<기사 출처 : 뉴스1>
댓글 없음:
댓글 쓰기